
Experience
- Assistant Professor
Harbin University of Science and Technology 2024 - Present - Post-doctoral Researcher
The Chinese University of Hong Kong 2023 - 2024 - Post-doctoral Researcher
Harbin Institute of Technology 2020 - 2022
Education
- Ph.D. in Mechanical Engineering
Harbin Engineering University 2014 - 2020 - Visiting Ph.D. Student
The University of Texas at Austin 2017 - 2018 - B.S. in Mechatronics
China University of Mining and Technology 2008 - 2012
Visitors
About
I am currently an Assistant Professor at Harbin University of Science and Technology. I earned my Ph.D. in Mechanical Engineering from Harbin Engineering University in 2020, under the supervision of Prof. Lixun Zhang, with co-guidance from Prof. James Sulzer (formerly at UT-Austin, now at Case Western Reserve University). Following my Ph.D., I worked as a Postdoctoral Researcher at Prof. Hongliang Ren's Lab at The Chinese University of Hong Kong (CUHK), where I focused on developing robotic technologies for rehabilitation, assistance, and medical applications. My research has been driven by a passion for advancing robotics to address critical challenges in healthcare and human assistance.
Research
My research interests include:
- Robotic Technology in Rehabilitation
- Human-machine System Modeling
- Medical Robotics
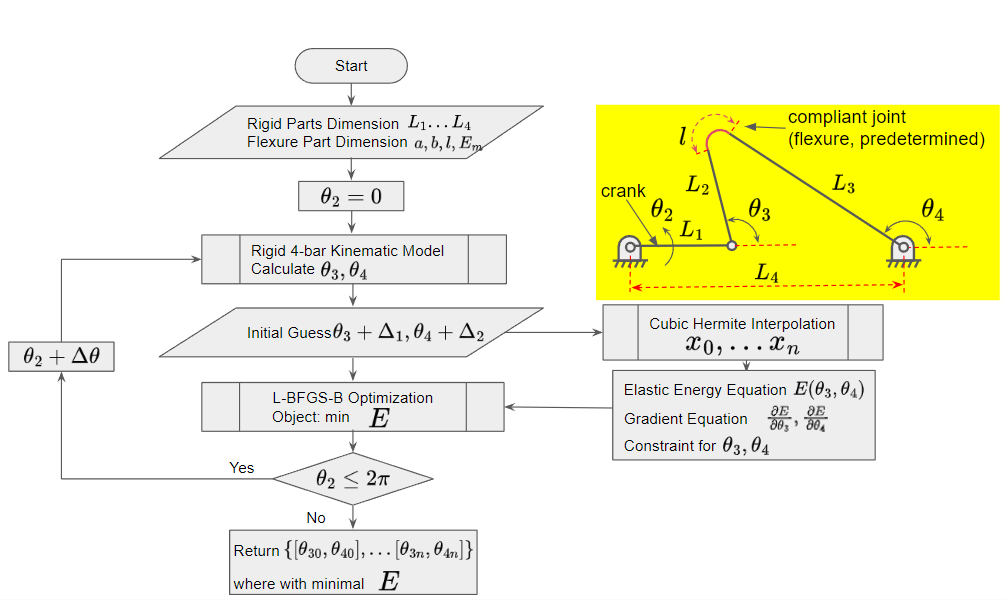
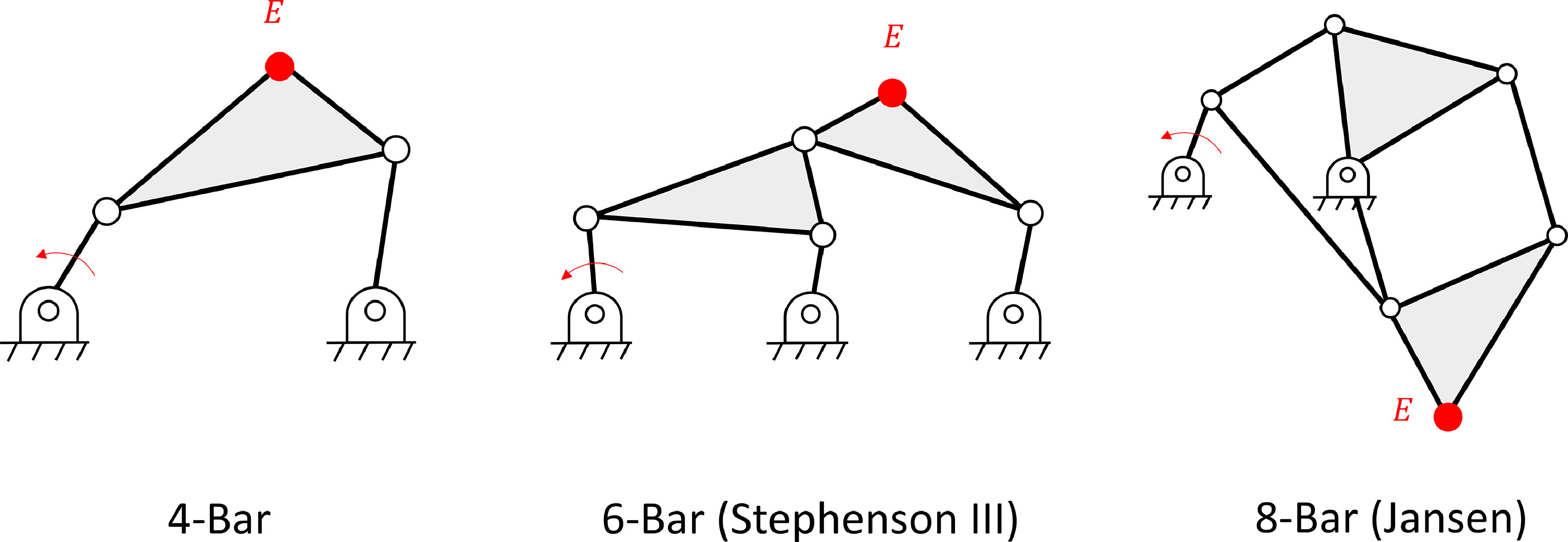
- Mechanism Design and Optimization
Research Projects
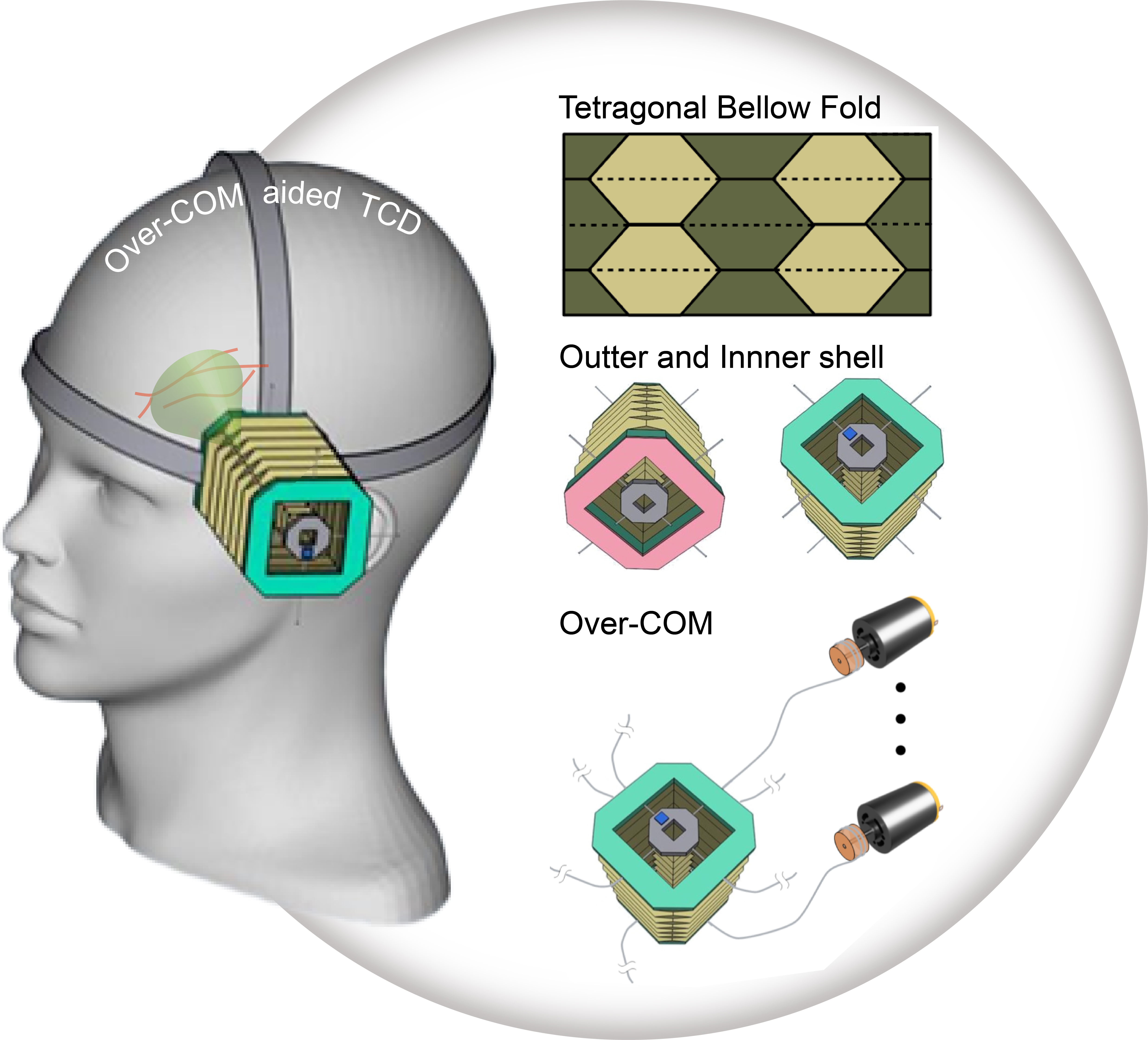
Origami and Compliant Mechanism
Exoskeleton for Gait Training
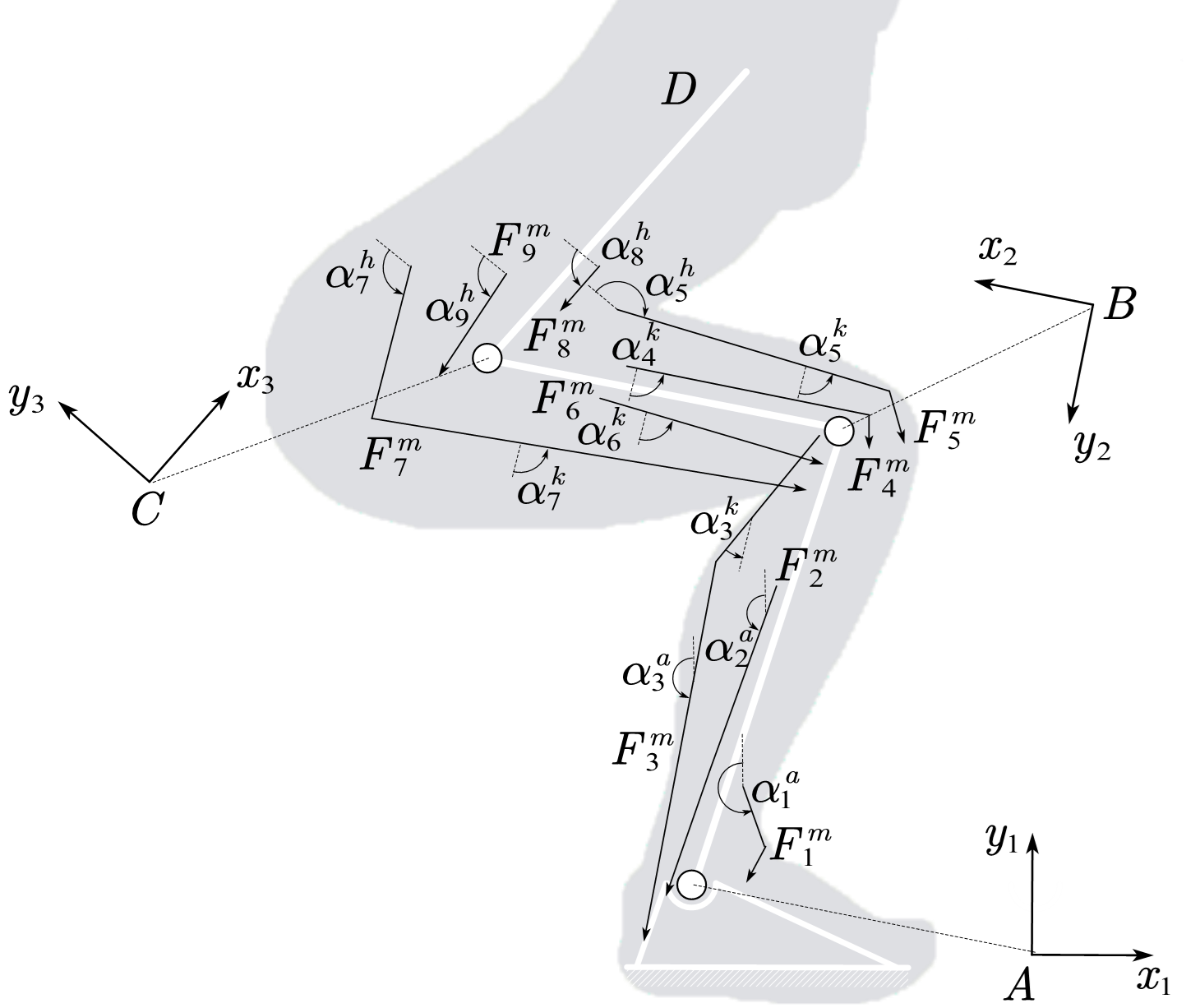
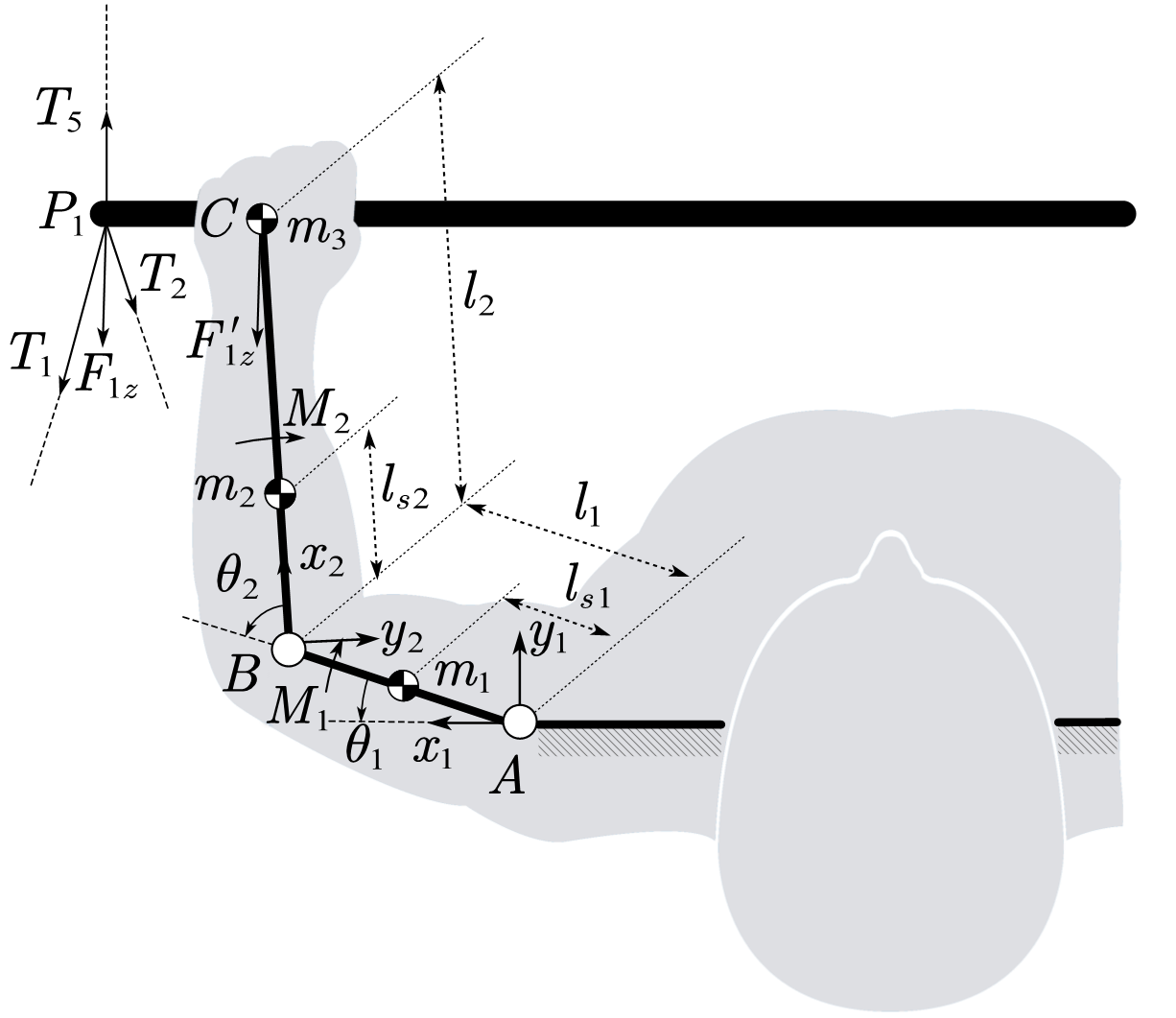
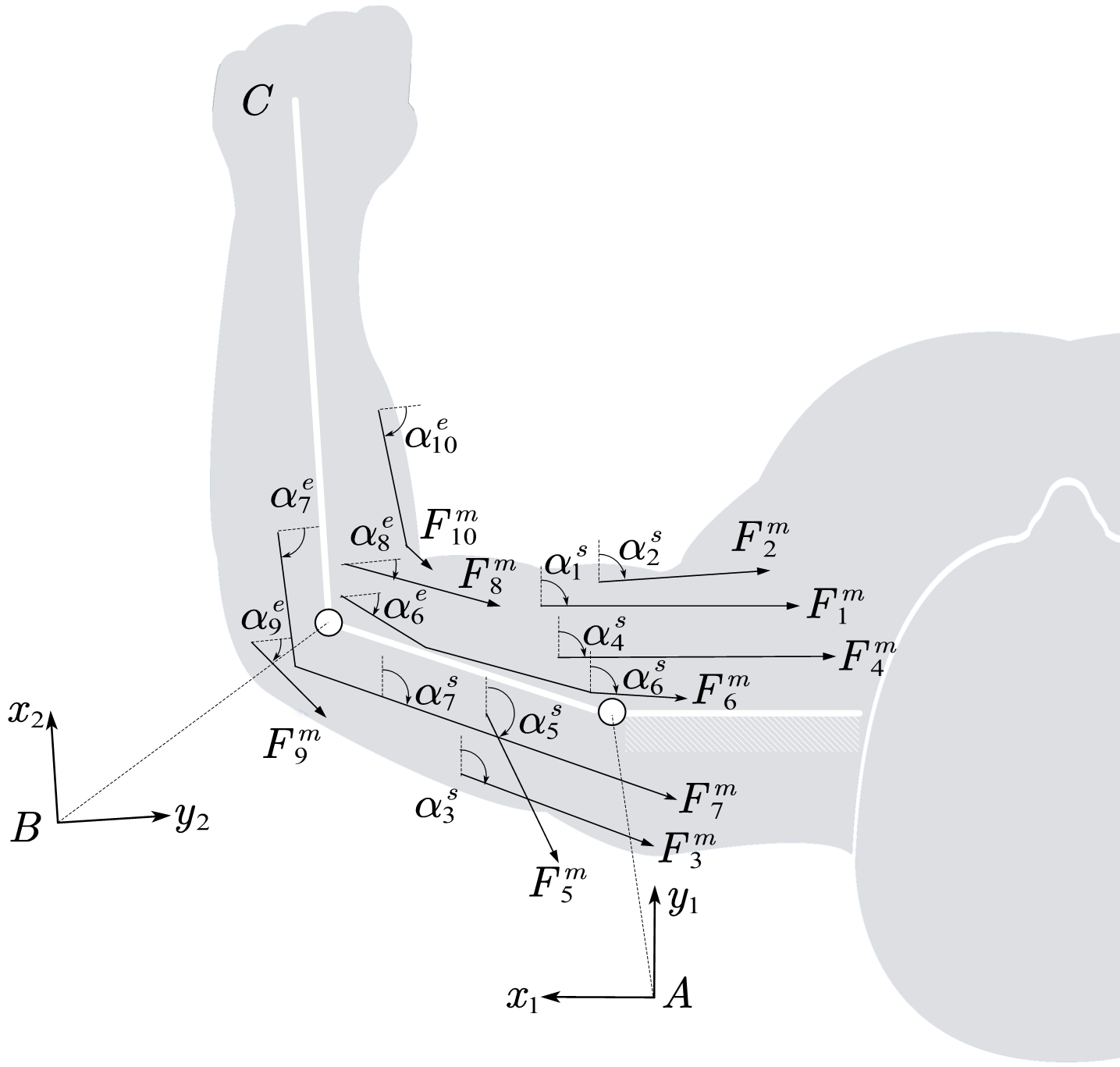
Biomechanics
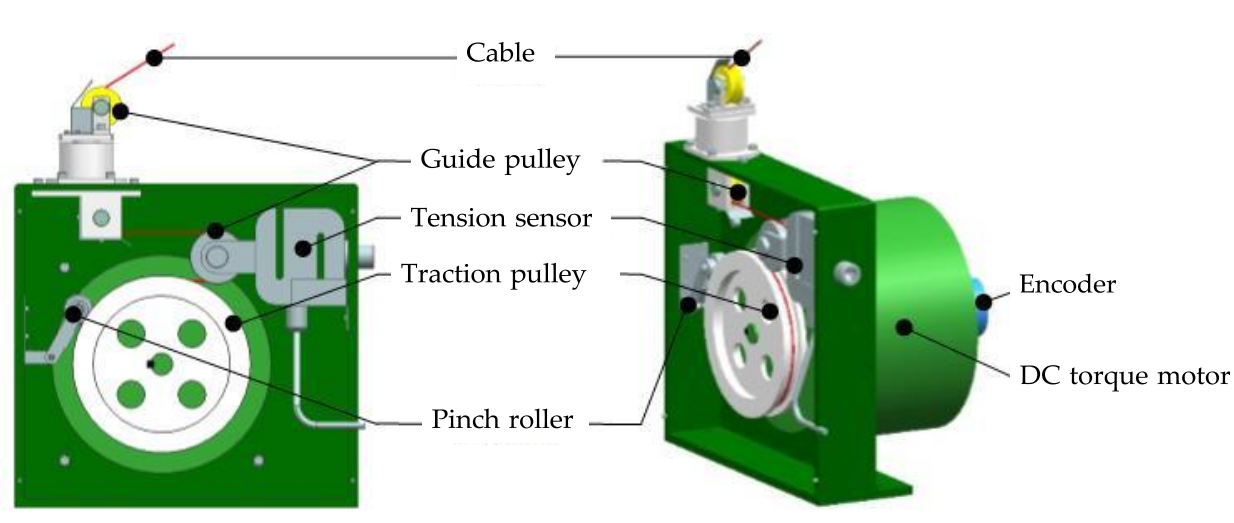
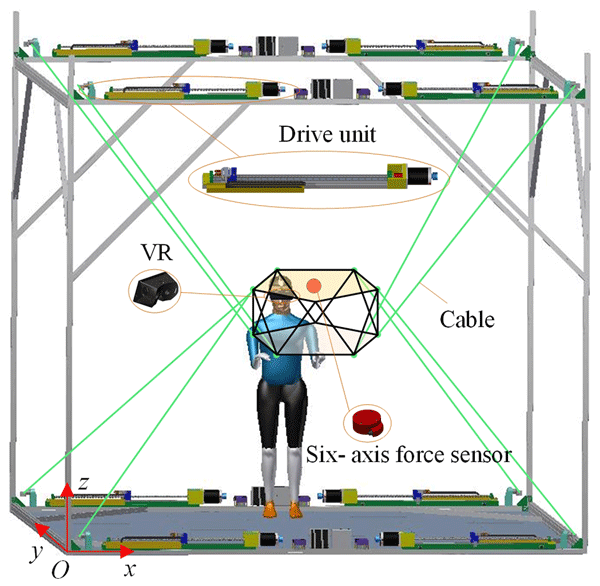
Cable-Driven System
Selected Publications
Journal Papers
[J1] An Overhead Collapsible Origami-Based Mount for Medical Applications
Robotics, 2023
[J2] Modeling and control strategy of a haptic interactive robot based on a cable-driven parallel mechanism
Mechanical Sciences, 2023
[J3] Running Experimental Research of a Cable-Driven Astronaut on-Orbit Physical Exercise Equipment
Machines, 2022
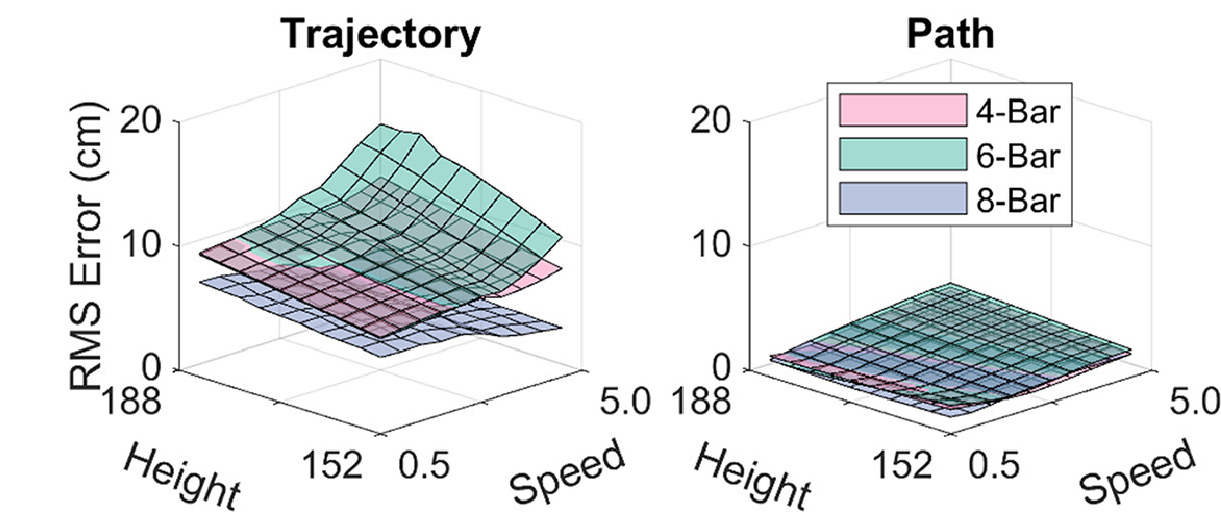
[J4] Kinematic comparison of single degree-of-freedom robotic gait trainers
Mechanism and Machine Theory, 2021
[J5] Running experimental research of a wire driven astronaut rehabilitative training robot
IEEE Access, 2018
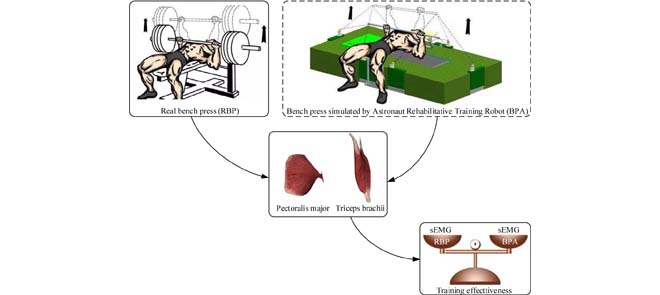
[J6] Force control strategy and bench press experimental research of a cable driven astronaut rehabilitative training robot
IEEE Access, 2017
[J7] Force Control and Experimental Study of a Cable-Driven Robot for Astronaut Deep Squat Training
Jiqiren/Robot, 2017
[J8] Workspace Algorithm and Layout Optimization of Parallel Mechanisms Driven by Flexible Cables
Journal of Harbin Engineering University, 2017
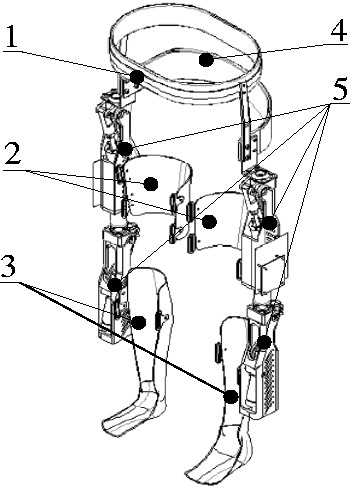
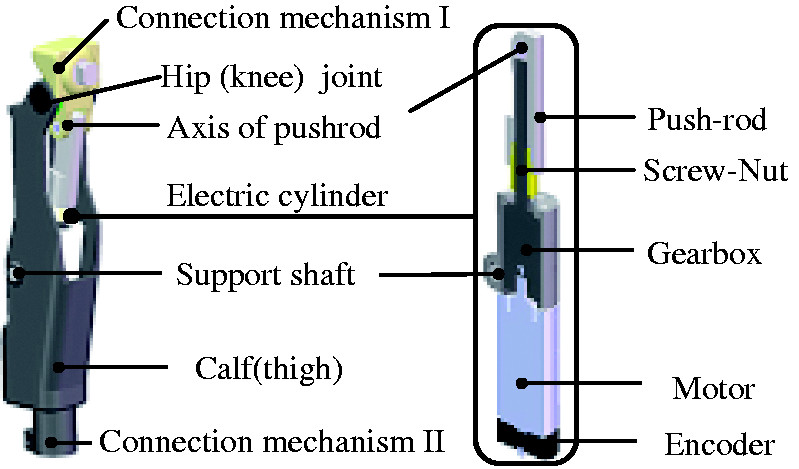
[J9] Prototype design, modeling, and experimental research of a novel lower limb powered exoskeleton
Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2017
Conference Papers
[C1] Chained Flexible Capsule Endoscope: Unraveling the Conundrum of Size Limitations and Functional Integration for Gastrointestinal Transitivity
IEEE International Conference on Robotics and Automation (ICRA), 2024
[C2] Simulation Analysis of A Cable-Driven Astronaut on-Orbit Physical Exercise Equipment
International Conference on Advanced Robotics and Applications (ICARA), 2023
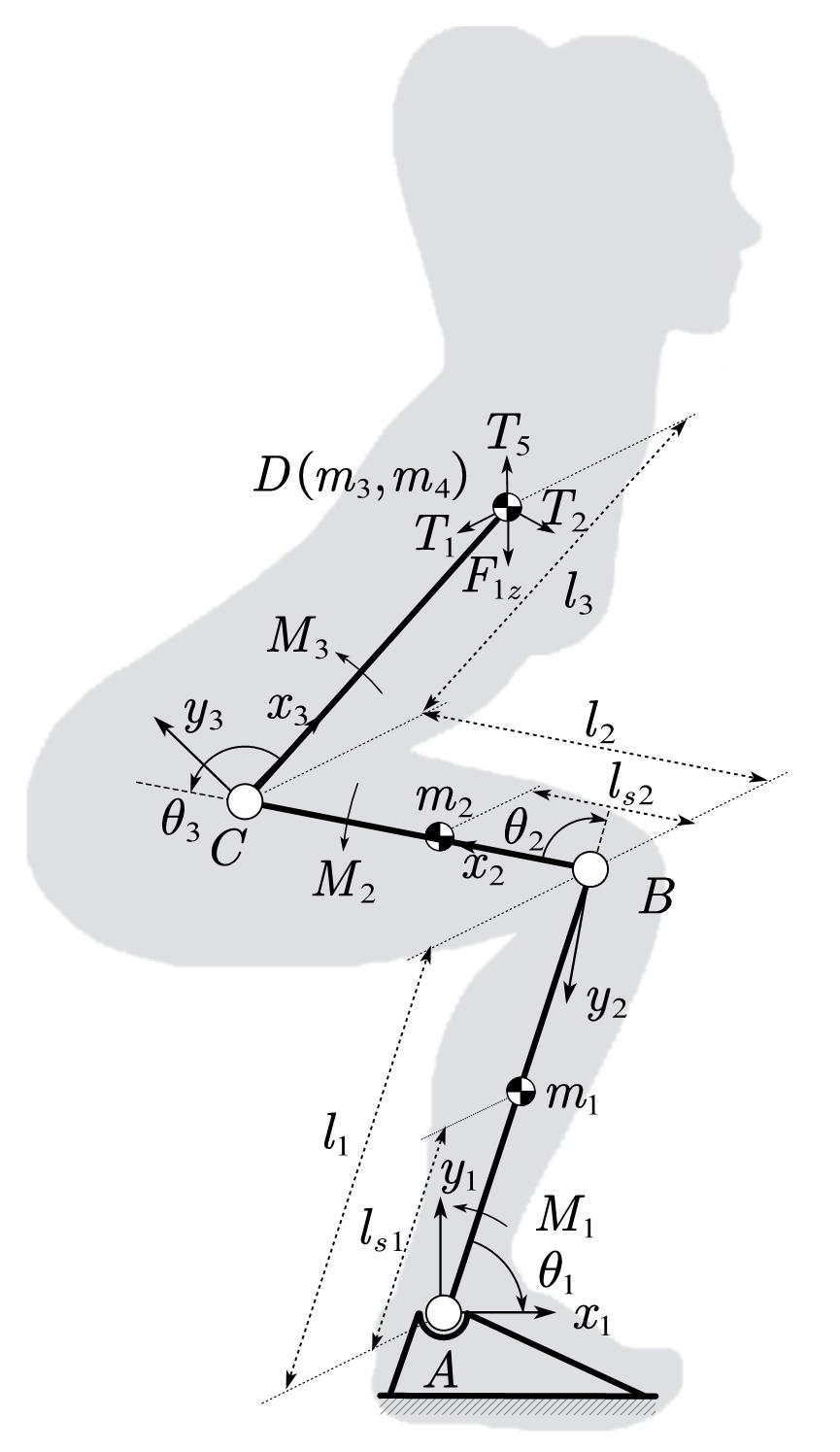
[C3] Dynamic analysis of the human-machine system of a 4-Bar gait constraint mechanism
International Conference on Mechatronics and Robotics Applications (ICMRA), 2022
[C4] Trajectory Planning of an Underactuated Cable-Driven Planar Device for the Trunk
IEEE International Conference on Mechatronics and Automation (ICMA), 2021
[C5] A Radau Pseudospectral Method-Based Optimization Model for Upper Limb Muscle Force Analysis During Bench Press Process
Basic & Clinical Pharmacology & Toxicology, 2019